



缠绕机的发展主要可分为以下四个阶段:
一 阶段为机械控制式缠绕机。这种缠绕机的运动是采用齿轮、链条、链轮、离合器等机械方法实现的。其缠绕过程中要根据制品形状计算缠绕机传动系统的传动比,比较麻烦。更换产品类型和规格时,需要重新计算调整齿轮传动比和链条长度,调换相应的齿轮和链条,因此非常费时费力,且无法满足一些特殊形体的缠绕制品生产,控制精度也只有20%。但该型缠绕机制造成本低、结构简单、运行可靠、维修方便,易于操作,因此目前在我国仍占有很大的比重。
第二阶段为数字程序控制缠绕机。该类型缠绕机是将芯模的角位移和缠绕小车的线位移转化为电脉冲形式的数字量进行控制。芯模主轴带动一个能发出电脉冲的编码盘,主轴发出的脉冲按照一定的比例调节后送给缠绕小车的伺服马达使小车按照一定速度运动。该型缠绕设备可完成非线形缠绕,使用灵活,操作简便,能满足一些特殊产品的生产。但这类缠绕机都采用了仿形凸轮,在更换产品时仍需要较长的时间进行凸轮的设计加工和安装调试,生产复杂产品仍受很大限制。
第三阶段为小型通用计算机数字控制缠绕机。其控制功能是依靠事先存放在存储器中的系统程序来完成的。改变程序控制逻辑可以适应不同制品的缠绕,因此大大增加了设备的灵活性和适应性。但是由于小型计算机当时价格相当昂贵,因此该型缠绕机未得到普及。
第四阶段为微机控制缠绕机。该型缠绕机在性能上发生了根本变化,缠绕功能更加完善,适应性和灵活性更强,可以实现多轴缠绕运动的控制,线形精度和重复性精度更高,运行可靠,操作简便。







目前,随着科技的发展,复合材料的缠绕制品越来越多的被应用于航空航天等高科技领域,作为缠绕制品的缠绕设备—数控缠绕机也发生着翻天覆地的变化。由于制品的工艺要求不同,不同的设备日渐成为需求的对象。而国外对于一部分特殊缠绕技术和控制技术都是严格控制的,因此,自助开发与研究数控缠绕机具有十分重要的意义。
缠绕机的张力的稳定控制是复合材料缠绕过程中保证制品质量的关键技术之一,如果张力选择不当或张力控制不稳定,可使缠绕制品的强度损失达20%~30%。由此可见,性能优良的数控缠绕机必须配备控制张力的张力控制器。针对锥段和柱段不同的缠绕工艺,分别采用了将磁粉离合器和力矩电机作为锥段和柱段的张力执行元件的控制方案。
在工业控制中,由于PID调节具有适应性强,而且原理简单等优点而得到了广泛的应用,但是当输入方式改变或环境的变化使干扰的形式发生变化需要重新人工整定,难以取得满意的控制效果。而基于模糊神经网络的PID控制算法克服了传统PID控制的缺陷,满足系统要求的同时,精度得到了极大的提高,是一种切实可行的方法。
水平式无纺布缠绕包装机包装结束后自动将产品推出,可实现为无人化包装系统,软启动|软停止,自动复位,自动测高,操作方便,可根据需要设计缠绕方式和次数。
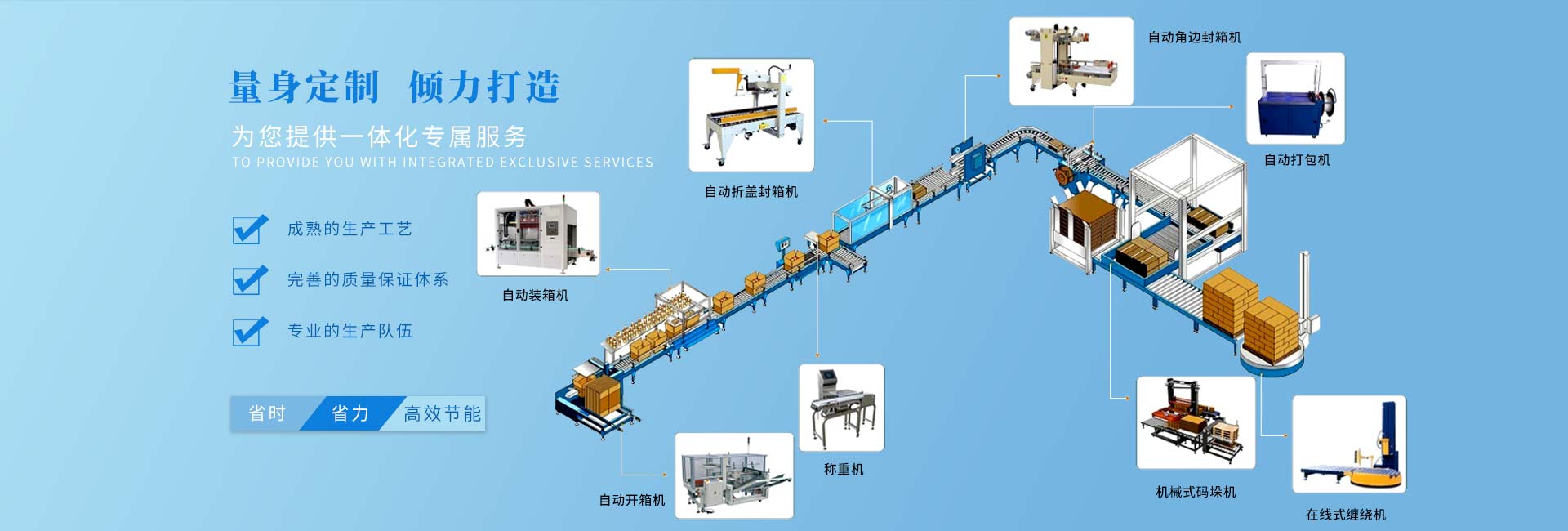
通过回转臂系统围绕水平匀速前进的货物做旋转运动,同时通过拉伸机构调节包装材料的涨力,把物体包装成紧固的整体,并在物体表面形成螺旋式规则包装的设备。应用于塑料型材、铝材、板材、管材、染织品等行业。能够提高包装效率、减少装运过程中的损耗,具有防尘、防潮、降低包装成本等优点。



 在线客服
在线客服 13851918388
13851918388 183969645@qq.com
183969645@qq.com


