
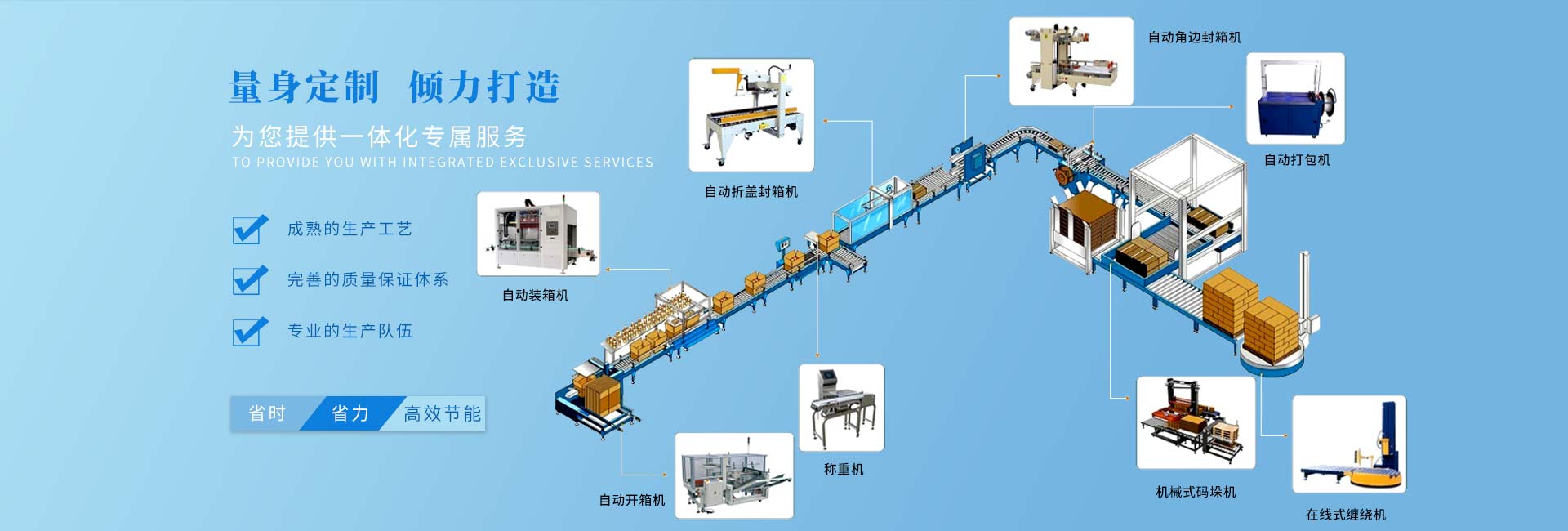



该机器人码垛机特点有:1.按照生产工艺的要求,遵循一程序、时间和位置来完成工件的传送和装卸。2.改善了工人的劳动条件,显著的提高了劳动生产率,加快实现工业生产机械化和自动化的步伐。3.该公司箱子与桶由于尺寸差别较小因此不用来回更换抓手,节省时间且方便作业。4.多关节机器人动作灵活、运动惯性小、通用性强、能抓取靠近机座的工件,并能绕过机体和工作机械之间的障碍物进行工作。5.抓手大小可以根据包装箱体外形尺寸来进行合理幅度调整。6.按排列码将桶装或箱装物料放在托盘(叉车板)上,进行自动堆码,可堆码多层,然后推出,便于叉车运至仓库储存。7.可减少劳动人员和降低劳动强度,以及一些对人体有害的化工物料的码垛岗位,适用于各种规则物料的码垛搬运。






现在,码垛机越来越受到重视,但是我们知道,无论使用什么设备,在操作过程中都会出现不可避免的问题。如果不遵守规则,很可能会发生风险。那么,应该如何操作码垛机呢?具体操作要注意以下几点。 1.在开始码垛机的操作之前,请确保电源已连接且插头已松动,在确认没有问题后,再开始供电。 2.在操作码垛机之前,请阅读说明书,并在操作前理解说明书。 3.正常运行时,定期检查自动码垛机各部件是否松动或脱落,确认自动码垛机在使用时不存在影响生产线运行的故障。 4.码垛机启动时,禁止站在设备下方,与设备保持一定距离,在完成一个操作过程后靠近设备,以防发生事故。 5.机器运转时,将手伸入皮带或链条内,或放入与设备无关的东西进行修理或检查。禁止操作,以免受伤。如有问题,请在操作前关闭电源。 6.当机器从原来的位置移动时,必须由技术人员进行复位和测试,确认正常后才能使用。 7.定期检查电气设备的连接,并清洁设备。

码垛机大部分是根据特定工作的要求设计。比如,当确定手部大小、形状,手指个数以及动作自由度时,须考虑被抓取物的大小、形状、重量、材质、外力的物理条件以及旋转环境等。而这些又决定手部的抓取机能,即约束性、操作性和感觉性。主要有两种结构形式,一种是门式直角坐标码垛机,另一种是臂式直角坐标码垛机。门式直角坐标码垛机可承受较大载荷,结构稳定,占据空间大;悬臂式坐标码垛机使用灵活方便,占据空间小。直角坐标码垛机的终端设备因用途不同,可以装配各种各样的夹治具,有吸附式,抓取式,夹板式等,可以码垛各种规格包装的物品如袋装、箱装、桶装、瓶装、板材等。直角坐标码垛机主要用于在自动化生产过程中执行大批量工件的搬运,加工处理及转移等任务。它组成的码垛设备比其它码垛机成本低很多,将被在更多的行业广泛应用。



 在线客服
在线客服 13851918388
13851918388 183969645@qq.com
183969645@qq.com


